点击【 大 中 小 】, 可 以 选 择 字 体的大小,以便 你 阅读.
1 引言
目前,随着我国经济的发展,铁路运输的紧张状况将愈来愈突出,为解决铁路运输紧张的局面,铁道部提出提速问题。但随着车速的提高,车轮轴承温升问题愈发重要。这就需要加强对轴承温升的监控。
当有火车经过时,其自身不停地向外辐射红外热能,从而在物体表面形成一定的温度场,利用安装于钢轨两侧的热像仪吸收车轮发出的这种红外辐射能量,将其热像显示在荧光屏上,从而准确判断物体表面的温度分布情况,对温升超标的车轴实时报警,避免由于车轴热切而造成列车脱轨或颠覆等事故的发生。本文采用PLC控制步进电机驱动热像仪来检测车轮轴温。
2 系统设计
现代的运动控制方法主要有直流伺服驱动、交流伺服驱动、步进伺服驱动。其中交流伺服驱动的性能最好,但价格较高。随着步进伺服驱动控制技术迅速发展,步进伺服驱动细分精度日益提高,且逐步克服了振荡,失步的不足,其性价比大幅度提高。步进电机可直接用数字信号控制,无需反馈可开环工作,无累积定位误差,控制精度高,因此被广泛用于数字控制和计算机控制等精密定位的控制系统中。
可编程序控制器PLC是一种适于工业现场控制的技术平台。PLC综合了计算机技术、自动控制技术和通信技术,使用面向过程、面向用户的简单编程语言,用户可通过软件设计,实现各种复杂的逻辑控制。PLC具有较好的实时刷新功能,可以产生一定频率的脉冲信号,而且PLC具有大功率的晶体管输出接口,能够满足步进电机绕组的电压和电流要求。因此,本系统采用可编程控制器(PLC)为控制核心,步进电动机为执行元件、传感器为检测元件的新型系统,实现对温升的检测,系统的结构如图1所示。
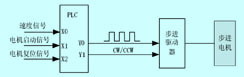
图1 系统结构图
当有火车驶来时,传感器将检测到的速度脉冲信号送入PLC接口X0,PLC根据这个脉冲信号计算出相应的火车速度,并输出一个相应的速度脉冲信号给步进电机驱动器,驱动器控制步进电机,使其驱动热像仪做半圆周运动,当热象仪速度与火车速度相同或相近时,对火车车轮进行跟踪拍照,从而确定车轮轴温。红外探测器沿铁轨进行布置;热像仪安放在离车轨距离约1m的架子上。
用于步进电机的角位移与输入脉冲的个数成正比;转速与脉冲频率成正比;转向与脉冲分配到步进电机的各相绕组的相序有关。因此利用PLC可产生一定周期的控制脉冲,使移位寄存器移位,产生相应时序,通过环形分配器使输出继电器按时序接通驱动步进电机并由计数器控制脉冲个数,使步进电机按一定速度,转动一定的角度。根据功能要求,综合考虑步进电机的性能,选择两相混合步进电动机2S42Q-03848,步距角,相电流1.2A,保持力矩0.32Nm,用于驱动热象仪;步进电机驱动器选用2M412,电源电压DC为18V~36V,它根据PLC的控制指令对电机实现脉冲和方向控制。PLC对电机的控制有两种方式,一种是脉冲+方向控制(Y0、Y2输出脉冲、Y1、Y3输出方向),一种是正反向脉冲输出(Y0输出CW脉冲,Yl输出CCW脉冲),我们采用第一种方法。
3 控制系统的实现
在本系统中,如何使PLC根据脉冲宽度计算出火车的相应速度是十分关键的。我们选用台达PLC DVP16EH00T,共8点输入(X0~X7),8点输出(YO~Y7),控制步进电机的工作状态和转速;除具有一般逻辑控制与运算功能、PLSY脉冲直接输出等外,更重要的是它的SPD脉冲速度侦测功能,可以方便的用来测量车速。
SPD的控制格式:
当控制信号为ON时,D1计算由X0所输入的高速脉波,40ms之后自动停止计算,结果被存于D0中,40ms计时完毕时,D1内容被清除为0,当控制信号再度为ON时,D1重新接受计数。SPD指令主要目的在求出回转速度的比例值,而测得之D0的结果与回转速度成比例,由下列公式求得电机转速[2]。
式中: N:转速;
n:旋转设备转一圈所产生的脉波数;