电液伺服控制技术在TRT自动控制系统中的研究与应用 | |
|---|---|
| (点击题目可以在互联网中搜索该题目的相关内容)日期:2006-11-9 23:43:54 来源: 作者: 点击: | |
|
1. 引 言 TRT为高炉煤气余压能量回收透平发电装置的简称(Blast-Furnace Top pressure Recovery Turbine Unit),它是利用高炉出口煤气中所蕴含的压力能和热能,使透平膨胀机作功,驱动发电机发电的一种能量回收装置。从而达到节能、降噪、环保的目的,具有很好的经济效益和社会效益,是目前现代国际、国内钢铁企业公认的节能环保装置。 TRT自动控制系统分为主煤气系统、润滑油系统、电液伺服控制系统(动力油系统)、透平机轴运动检测系统、氮气密封系统和水系统等6个系统。 2. 电液伺服控制技术概述 电液伺服控制技术作为连接现代微电子技术、计算机技术和液压技术的桥梁,已经成为现代控制技术的重要构成。由于它具有线性好、死区小、灵敏度高,动态性能好、响应快、精度高等显著优点,因而得到了广泛的应用。本文针对这一问题,利用电液伺服控制技术和计算机技术,设计了一套适用在TRT自控系统中的电液伺服控制系统。
3.1电液伺服控制系统的构成 电液伺服控制系统由液控单元、伺服油缸、动力油占三大部分组成。液控单元包括调速阀控制单元和透平静叶控单元,每一单元均由电液伺服阀、点动用电磁阀、快关用电磁阀、油路块及底座等组成。伺服油缸为双活塞杆结构,摩擦力很小,密封性能良好。动力油站由油箱、变量油泵、滤油器、冷却器、管道阀门、检测仪表等组成。 3.2电液伺服控制系统的作用 电液伺服控制系统,在TRT装置中,属于几个主要系统之一。根据主控室的指令,来实现TRT的开、停、转速控制、炉顶压力以及过程检测等系统控制。要实现以上系统的功能控制,最终将要反映在控制透平机的转速上。要控制透平机的转速,就要控制调速阀或透平静叶的开度。而控制静叶或调速阀开度的手段就是电液伺服控制系统。控制系统的精度、误差,直接影响着TRT系统各阶段过程的控制。由此可见,该系统在TRT 中的地位和作用是十分重要的。 3.3电液伺服控制系统的工作原理 由机、电、液供构成电液伺服控制系统,其控制方框图如下:
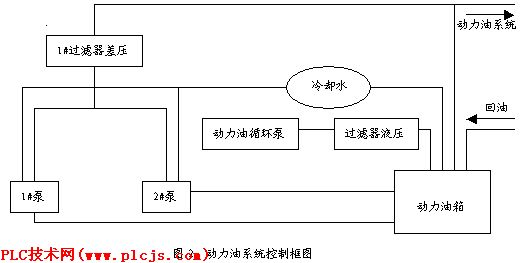
点击看原图 由自控系统发出的指令信号,在伺服控制器中与油缸的实际位置信号相比较,成为误差的信号放大后,送入电液伺服阀。伺服阀按一定的比例将电流信号转变成液压油量量推动油缸运动。由位置传感器发出的反馈信号不断改变,直至于指令信号相等时,油缸停止运动。油缸停在指定的位置上,使透平静叶稳定在一定的开度上。 油缸的直线运动、 通过一套曲柄转变成阀板(静叶)的旋转运动,改变阀板或静叶的工作开度。随着系统信号的不断变化,透平静叶的开度也将不断改变,并通过静叶开度的变化,达到控制转数,控制煤气流量、控制透平出力大小的目的。其动力油系统控制图如下:
TRT最重要的控制设备是透平机静叶和快开旁通阀。它们都是液压伺服驱动的闭环系统。主要控制设备包括伺服控制器、伺服阀、LVDT反馈位置传感器、油动机、电磁阀。通过对电磁阀的得失电控制可以实现阀门和静叶的快速开关。 ⑴伺服控制器:伺服控制器(选用型号为ESA-3E)主要适用于轴流压缩机静叶角度控制、TRT压差发电、位置控制以及其它相关的电液执行机构的伺服控制。该控制器中有两块线路板: PARKER控制板是对控制指令信号和传感器反馈信号进行比较,经过比例、积分运算及功率放大后,送出相应的电流信号,用于驱动伺服阀; 信号调理板是用于对反馈信号进行调理,正反作用的转换,并提供指令信号丢失和反馈信号丢失两项报警功能及4~20mA位置指示信号。 本新闻共2页,当前在第1页1 2
|
|
| 上一篇: 国产PLC有哪几家比较好?下一篇: plc扫描周期概念 |