| |
|---|---|
| (点击题目 可以在互 联 网中搜索该题 目的相关内容) 日期:2006-9-19 22:25:16 来源: 中国自动化网 作者: 点击: | |
|
1 引言 九点控制器是在PID控制、模糊控制等控制策略的基础上发展起来的一种新型控制策略,其基本思想是将系统的调节量分成强弱不同的九个控制作用,按照系统偏差 及其导数 的变化特点来决定九个控制作用的切换时间和作用时间。目前,其研究已经取得一定的进展,利用泛布尔代数建立了九点控制器的理论模型[1],分析了九点控制器的稳定性及其性能[2],建立了有效确定九点控制器增益参数的实验方法[3],为九点控制器应用于工业现场奠定了基础。 在工业领域中,如反应器、皮带传送、以及用分析仪表测量流体成分等过程都存在纯延迟。在这些过程中,由于纯延迟的存在,使得被调量不能及时反映系统所承受的扰动,即使测量信号到达调节器,调节机关接受调节信号后立即动作,也需经过纯延迟时间 以后,才波及被调量,使之受到控制。因此,这样的过程必然会产生较明显的超调量和较长的调节时间。所以纯延迟过程是较难控制的过程[4]。对此,利用九点控制器中 作用的特性,可以一定程度上克服纯延迟对于系统性能的影响[5],但是该方法调节时间较长且抗扰动能力差,限制了它的应用范围。本文试图将九点控制器与史密斯预估器相结合,以找到一种克服纯延迟影响且调节时间相对较短的控制方案。 2 九点控制器基本原理 九点控制器的基本原理是依据偏差和偏差变化率来调整控制器输出,其组成如图1所示。其中为给定输入,为其输出响应,定义偏差,偏差变化率,其中 为采样周期,和分别为本次采样时刻和上次采样时刻。设为系统允许偏差(误差限,其中为误差上限,为误差下限),为系统允许偏差变化率(其中为误差变化率上限,为误差变化率下限)。 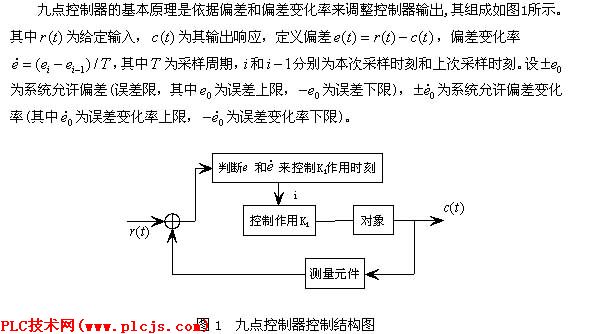 根据响应曲线的状态特征,将系统偏差及偏差变化率的大小各自分为三种情况。这样的组合变化就有九种情况,每种情况都代表系统的一种运动状态,称之为工况。控制器根据工况的不同来采用相应的控制策略。工况的确定和相应的控制规则如表1所示。  控制器根据这些由偏差和偏差变化率的组合而形成的九种工况采取相应的控制策略(控制作用力),及时向控制对象进行能量补充和消耗,从而达到控制目的。由于控制规则与相平面有一一对应的关系,故可以利用相平面说明九点控制器的作用原理,在相平面上其作用规律如图2所示。 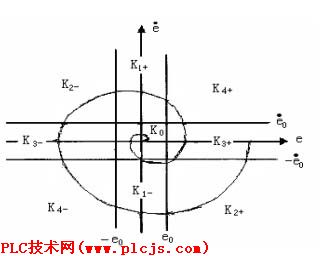 3 带史密斯预估的九点控制器方案 史密斯预估器的特点就是通过对对象模型的预测,用预估器补偿纯延迟对系统控制品质和稳定性的影响,将纯延迟环节从闭环回路传递函数的特征方程中移出。这样就将纯延迟系统的设计问题转换成了无纯延迟系统的设计问题。史密斯预估器使延迟 时间的被调量超前反映到调节器中,使调节器提前动作[6]。同时,九点控制器具有快速、准确、超调量小等诸多优点,将它与史密斯预估器结合起来,用九点控制器作为主控制器,史密斯预估器作为补偿器,则可以快速、准确地控制纯延迟系统。其控制方案如图3所示。 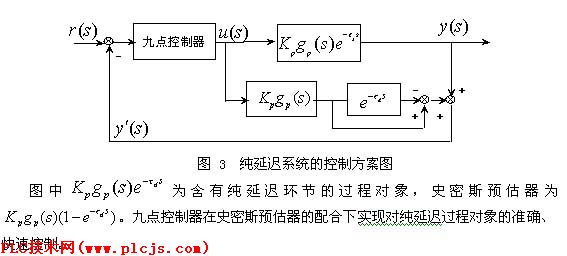 4 仿真分析 以工业过程中常见的二阶纯延迟过程为被控对象,其传递函数为 本新闻共2页,当前在第1页1 2
|
|
|
上一篇: PLD应用市场增长情况介绍 下一篇: 认识PLC可编程序控制器 |