点击【 大 中 小 】,可以选择字体的大小,以便你阅读.
1 引言
船舶自动化领域的一个重要组成部分是主机遥控系统。目前主机遥控系统技术方案多种多样,本文采用PLC工业控制网络来实现主机遥控系统的功能,具有经济性能好、硬件电路结构简单、工作安全可靠的特点。
在多PLC控制网络实现主机遥控系统设计的基础上,研讨主要设计整个PLC网络的总体结构和通讯方案,并通过通讯网络实现对主机的起停部分的自动控制及安保系统设计。
2 主机遥控PLC网络控制总体结构设计及通讯方式的实现
2.1 主机遥控PLC网络控制总体结构设计
PLC控制网络用于主机遥控系统的控制,包括两台S7-200PLC。其中一台用于主机起停和转速调节控制,安装在机控室;另一台用于完成电子调速器的任务,安装在机舱。另设计算机作为监视平台,用来监视整个系统的重要信号。
整个网络的主要设备为:两台S7-200PLC、一台微型机、网络连接器、PC/PPI电缆、RS-485电缆。
根据总体通讯设计思路,我们的总体结构图设计如图1。
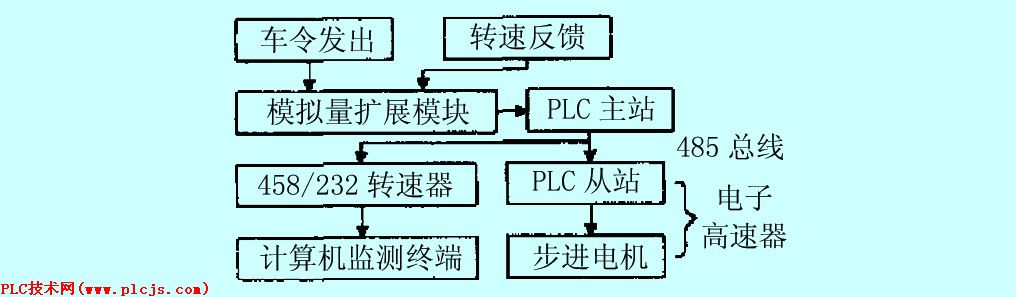
图1 总体结构图
如图,主站PLC通讯口出来地总线分别通过网络连接器和PC/PPI电缆和从站PLC以及计算机通讯。主从站之间通过RS-485总线进行PPI协议通讯,主站和计算机终端通过PC/PPI电缆进行自由口通讯。从主站PLC通讯口出来连接上网络连接器,是为了隔离,以免计算机RS-232口损坏。通过网络连接器出来地线以及RS-485信号A和B通过比较高低电平与从站进行通讯。同时通过PC/PPI电缆的连接口引出5针通过RS-485和RS-232转换成3条线分别为接收、发送和地线,与计算机进行通讯。S7-200PLC通讯口的引脚分配见附表。
附表 通讯口引脚分配

2.2 多通讯协议的组合及调试
在S7-200网络通讯中,可以实现两种通讯协议进行通讯而不互相干扰。但前提是两种协议的波特率必须相同,由于只有一个通讯口,波特率只支持9600波特,因此在多协议通讯时,波特率设置为9600波特。对于多协议的组合方式,作者采用了总线分时复用法,在总线分时控制中,作者通过几个定时器组成矩形波,从而形成高低不同时段分别进行PPI协议通讯和自由口通讯。主程序流程图见图2。PPI通信程序流程见图3。自由口通信程序的流程见图4。
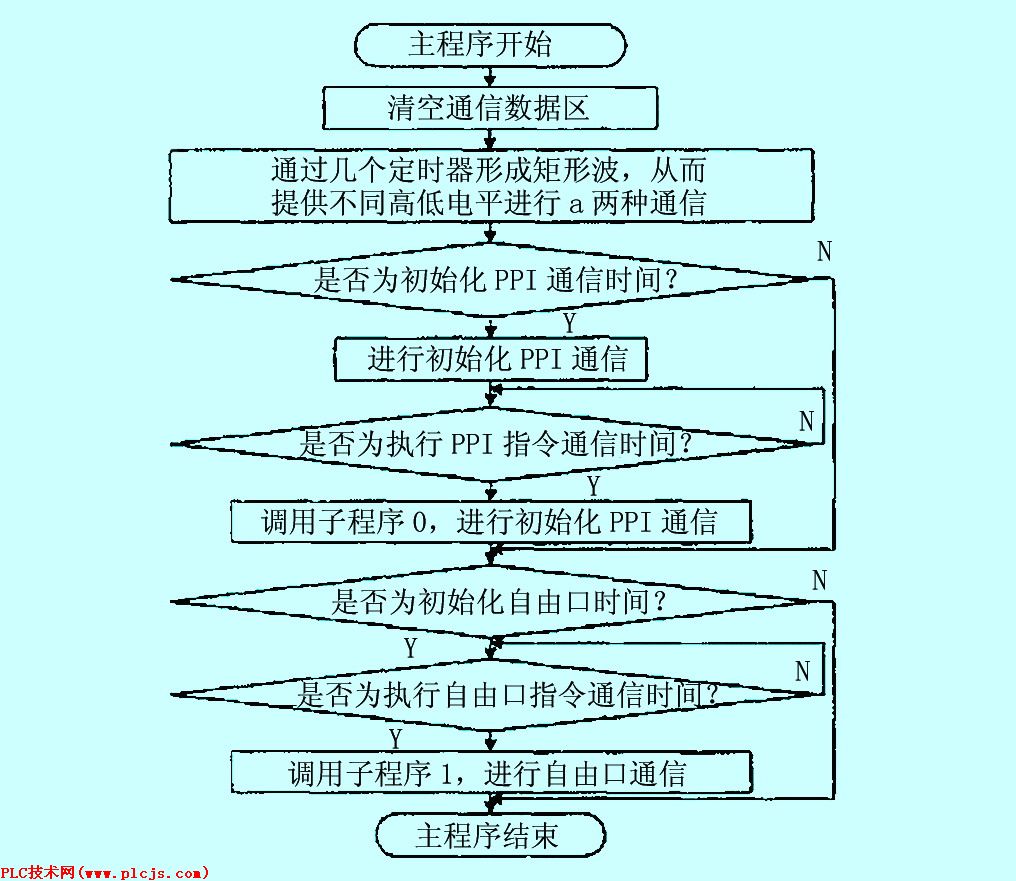
图2 主程序流程图见
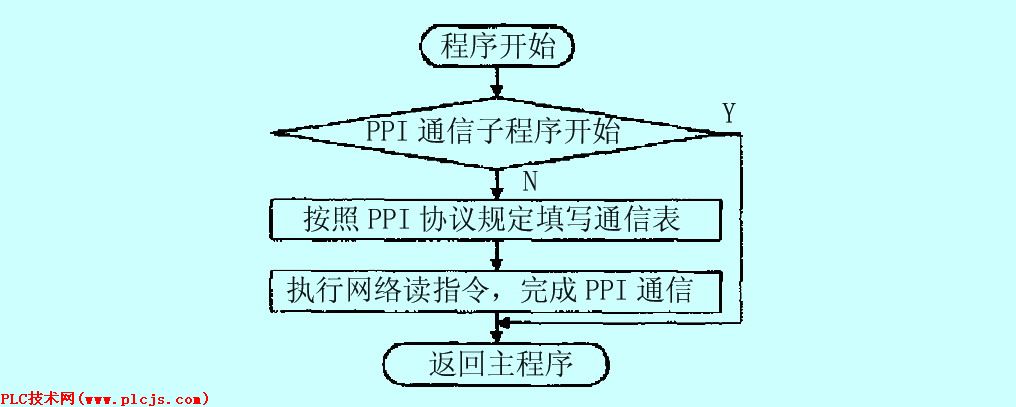
图3 PPI通信程序流程
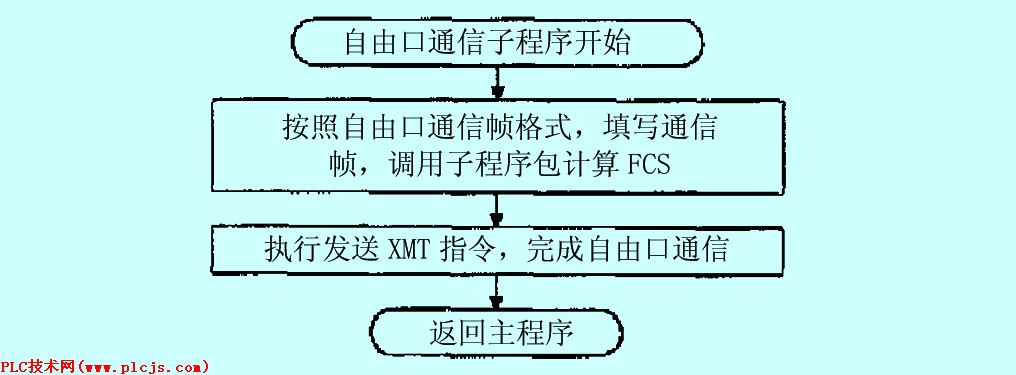
图4 自由口通信程序的流程
按照以上方案所进行的系统设计完成之后,实际的通讯效果达到设计要求,从站PLC和计算机终端基本上能在20ms内获取主站送来的信息。
3 主机遥控系统的设计
3.1 起停部分的设计
作者在设计过程中选择的对象是最常见的B&M低速机,起停控制主要包括5个部分:起动控制,慢转控制,停车控制,重复起动控制。以正车起动为例,系统须针对两种情况:停车情况下的起动和正常反向起动,都能确保正车起动电磁阀的通断,同时还须判断重复起动的状态,正车起动的程序流程如图5所示。
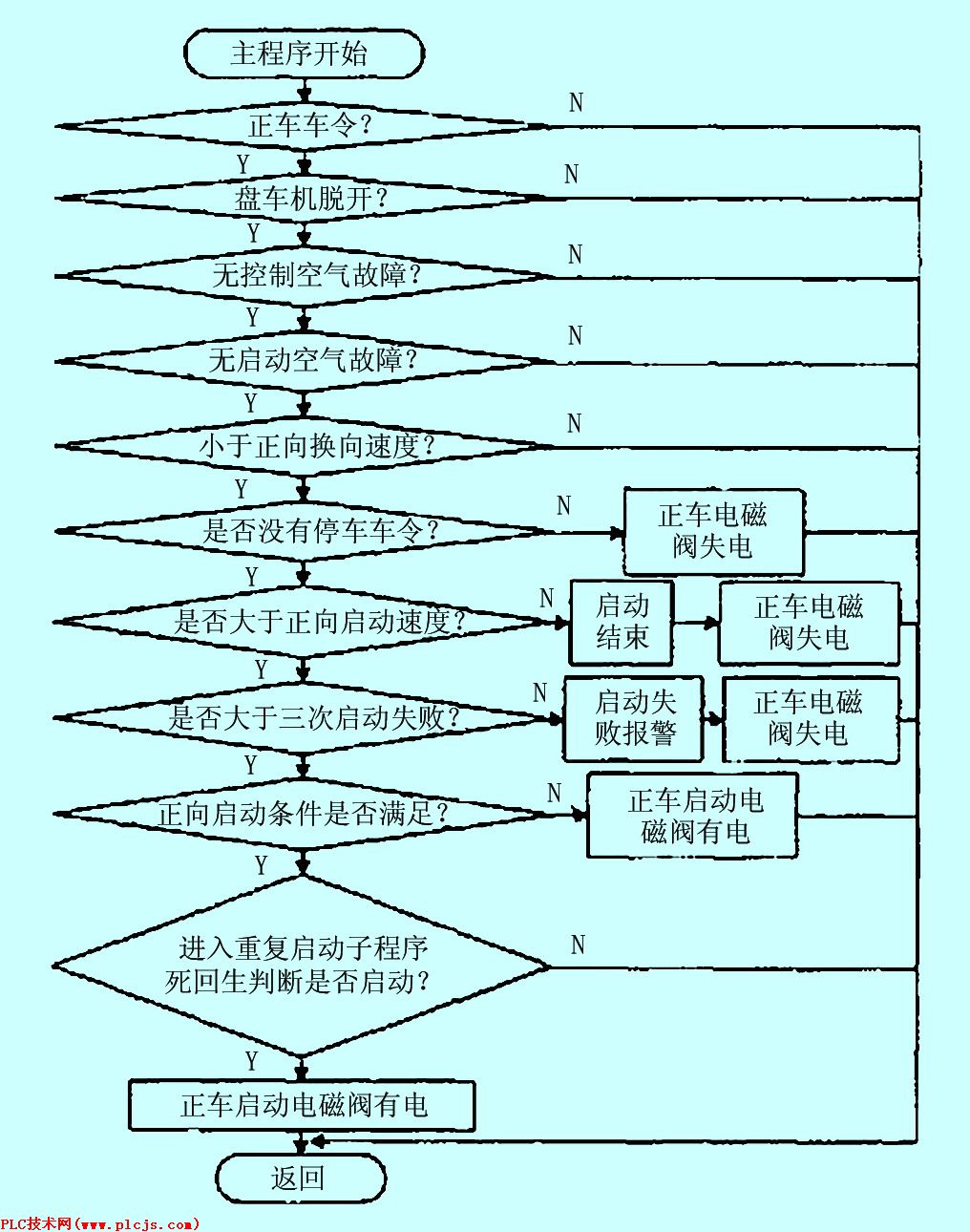
图5 正车起动的程序流程
慢转控制所要考虑的情况分别是主机停车时间超过30min和电源断电后恢复供电两种情况。在主机转过一圈或有紧急操纵信号的情况下,可以撤消慢转控制。停车控制所要考虑的情况共分4种:停车指令,故障停车信号,车令与运转方向不一致以及起动电磁阀工作期间。重复起动控制又分为4个子程序:起动时间监视子程序,换向时间监视子程序,起动间歇延时子程序和重复起动次数计数子程序。以上程序流程图由于篇幅所限,在此不一一赘述。